Upozornenie!
Vitajte na našej novej stránke! Treba sa znova registrovať .
Získajte tým 5% zľavu! Na väčšinu produktov.
Upozornenie!
Vitajte na našej novej stránke! Treba sa znova registrovať .
Získajte tým 5% zľavu! Na väčšinu produktov.
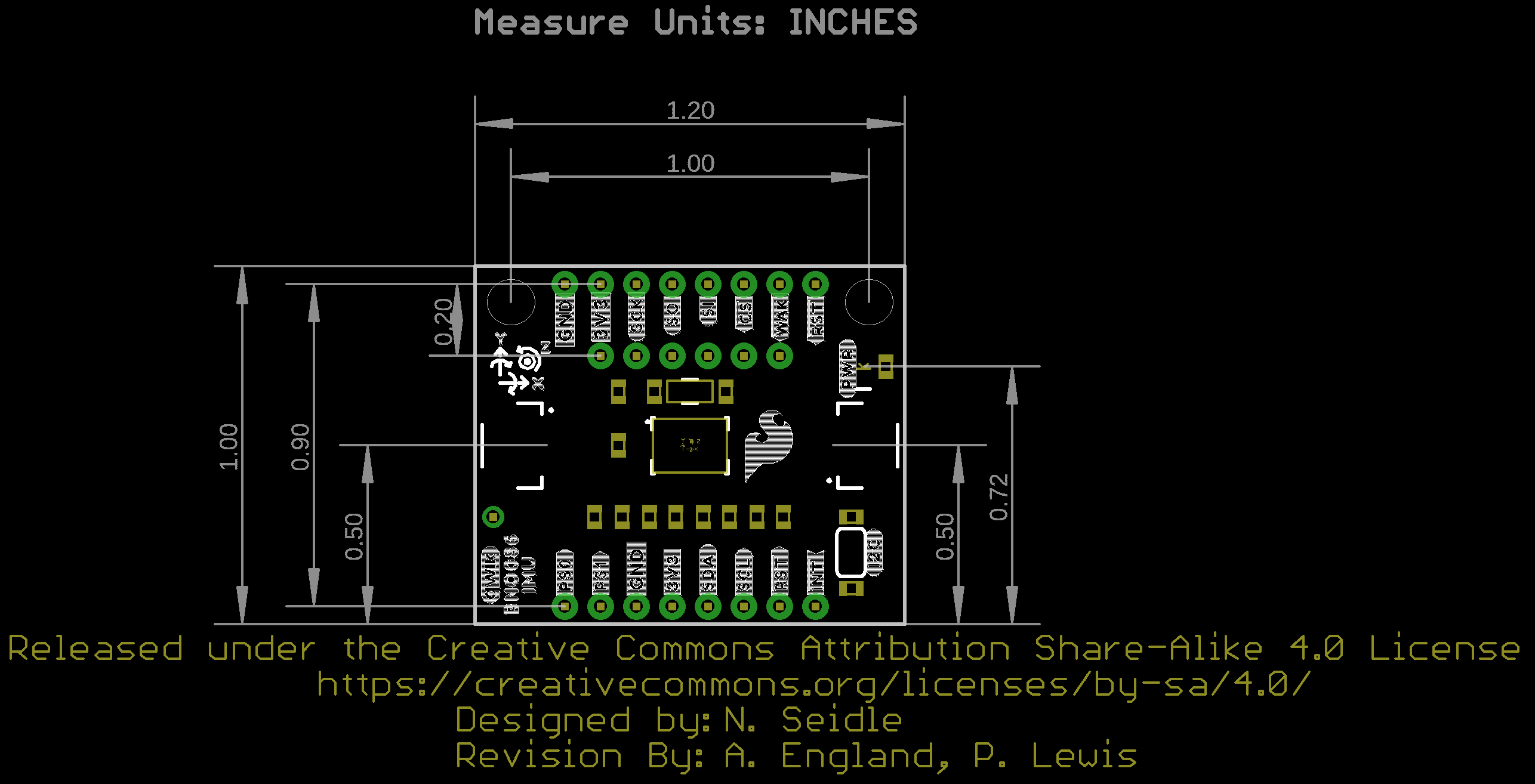
SparkFun VR IMU Breakout - BNO086 (Qwiic)
SEN-22857

SparkFun VR IMU Breakout - BNO086 (Qwiic)
Virtuálna realita je in, ale za získanie prístupu k technológiám, ktoré sú za ňou, by ste nemali prepúšťať stovky dolárov. Našťastie tu prichádza na scénu SparkFun VR IMU Breakout. Jeho srdcom je CEVA BNO086, kombinácia trojosového akcelerometra/gyroskopu/magnetometra System in Package (SiP) s 32-bitovým ARM© Cortex™ M0+. Inerciálna meracia jednotka BNO086 (IMU) vytvára presné rotačné vektorové smery, ktoré sa výborne hodia pre VR a iné smerovacie aplikácie, s dvojstupňovou alebo menšou statickou chybou otáčania. VR IMU je presne to, na čo sme čakali; všetky údaje zo senzorov sa kombinujú a korigujú sa na zmysluplné a presné informácie IMU. Je ideálny pre akýkoľvek projekt, ktorý potrebuje snímať orientáciu alebo pohyb.
Táto IMU breakout doska bola tiež vybavená dvoma I2C Qwiic konektormi, aby bolo prepojenie s malým balíkom QFN o niečo jednoduchšie. Je súčasťou systému pripojenia Qwiic SparkFun, takže nebudete musieť robiť žiadne spájkovanie, aby ste zistili, ako sú veci orientované.
BNO080 bol navrhnutý tak, aby bol implementovaný do mobilných telefónov so systémom Android, aby zvládol všetky výpočty potrebné pre okuliare na virtuálnu realitu iba pomocou vášho telefónu. S BNO080 EOL ponúka CEVA náhradnú BNO086 s vylepšenými funkciami (14-bitová fúzia akcelerometra, znížená spotreba energie pri nečinnosti a interaktívna kalibrácia). Senzor je pomerne výkonný a s napájaním prichádza zložité rozhranie. Vďaka spájkovacím prepojkám na doske si môžete vybrať medzi dvoma rôznymi adresami I2C. Napriek tomu, ak I2C nie je vašou prvou komunikačnou voľbou, senzor môže komunikovať cez SPI a UART! Napísali sme tiež knižnicu založenú na I2C, ktorá poskytuje vektor otáčania (čítanie, ktoré väčšina ľudí požaduje od IMU), zrýchlenie, hodnoty gyroskopu a magnetometra, počítanie krokov a klasifikátor aktivity (napríklad jazda na bicykli).
Na tomto odkaze môžete začať svoj projekt
Dokumentácia:
Buďte prvý, kto napíše príspevok k tejto položke.
Len registrovaní používatelia môžu pridávať príspevky. Prosím prihláste sa alebo sa zaregistrujte.


















































































































{kind=link}