UGV Beast Open-Source Off-Road Tracked AI Robot, Dual Controllers, Flexible And Expandable, All-Metal Body, Computer Vision, Suitable For Raspberry Pi 4B / Raspberry Pi 5
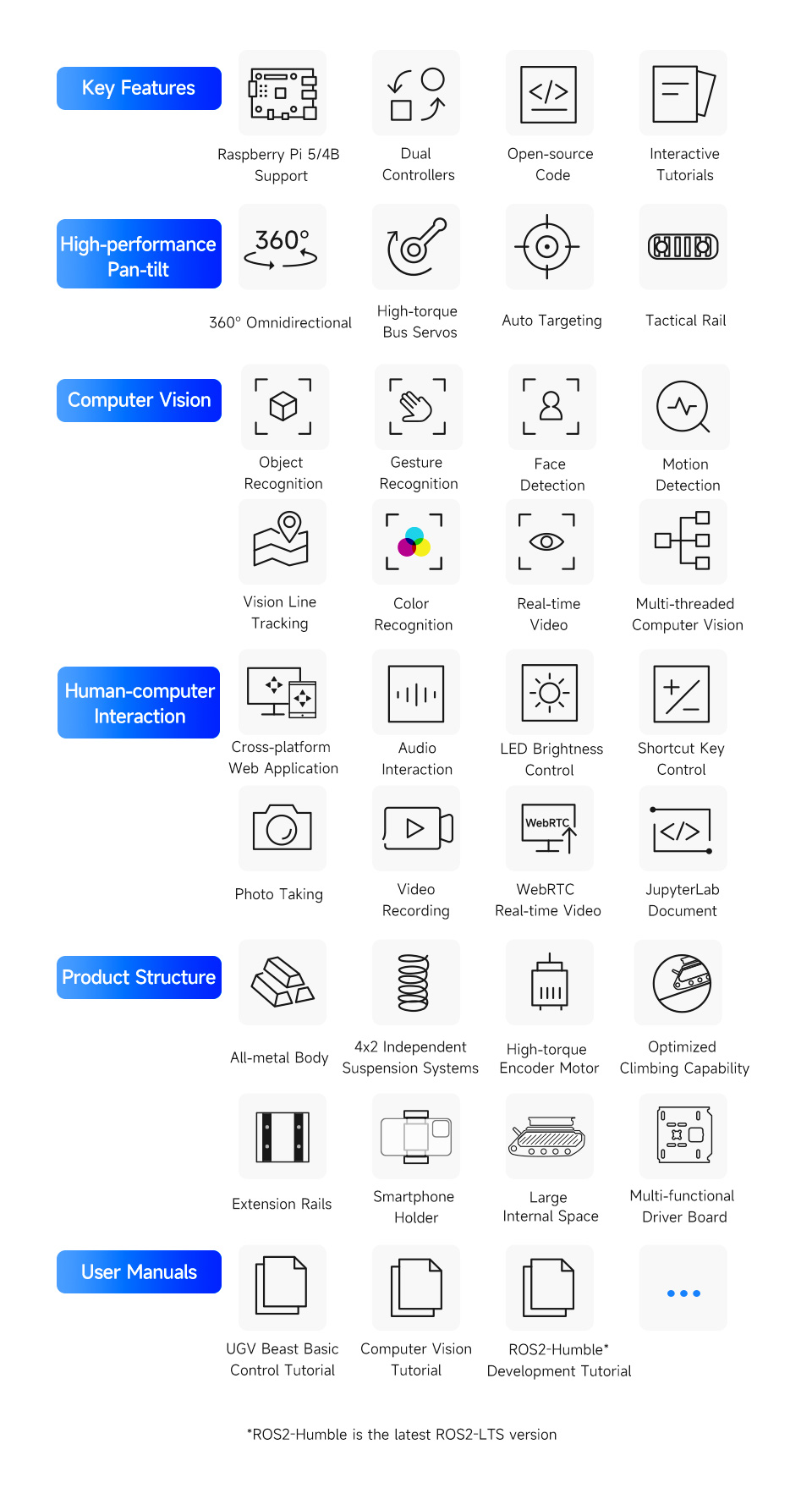
Features At A Glance
The UGV Beast is an AI robot designed for exploration and creation, with great expansion potential. It seamlessly connects your imagination to reality, suitable for tech enthusiasts, makers, or beginners in programming, it is your ideal choice for exploring the world of intelligent technology.
Equipped with the high-performance Raspberry Pi computer to handle complex strategies and functions while inspiring your creativity. Adopts dual-controller design, combines the high-level AI functions of the host controller with the high-frequency basic operations of the sub controller, ensuring that every operation is accurate and smooth.
You can easily control it remotely via the UGV Beast Web Application without downloading any software, just open your browser and start your journey. Supports high-frame rate real-time video transmission and multiple AI Computer Vision functions, the UGV Beast is an ideal platform to realize your ideas and creativity!
Based On Raspberry Pi
Supports Raspberry Pi 5 / Raspberry Pi 4B, Offering Powerful Computing Performance For More Possibilities
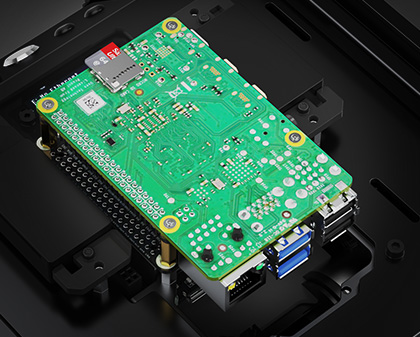
Connecting with Raspberry Pi 4B
Connecting with Raspberry Pi 5
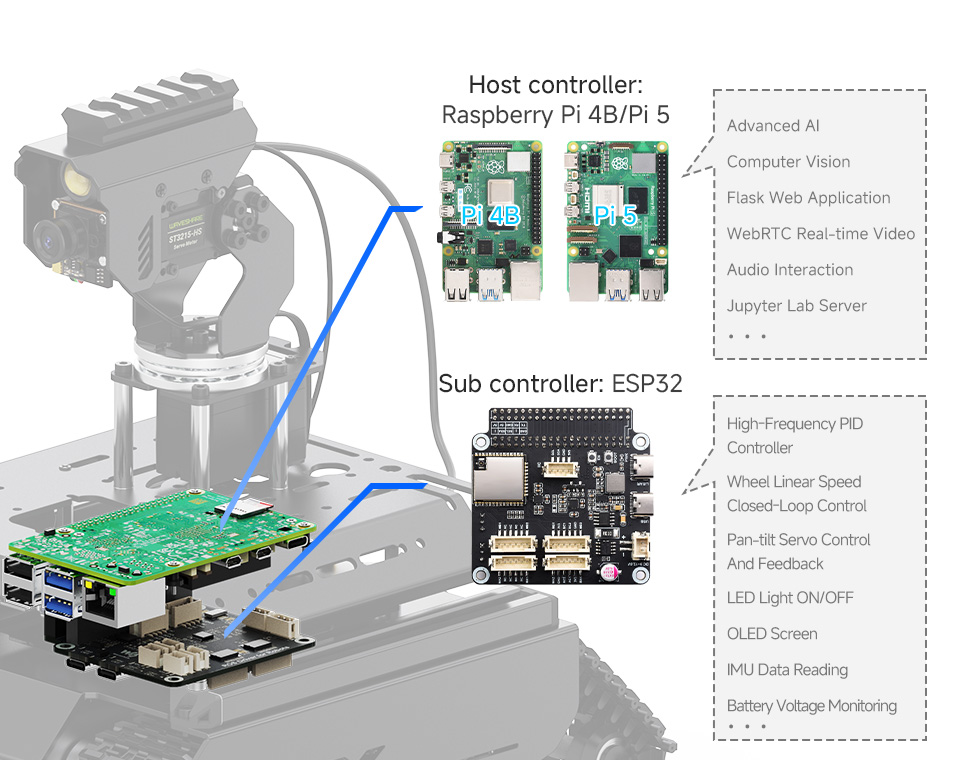
Dual-Controller Design, Provides Efficient Collaboration And Upgraded Performance
The Host Controller Adopts Raspberry Pi For AI Vision And Strategy Planning, And The Sub Controller Uses ESP32 For Motion Control And Sensor Data Processing
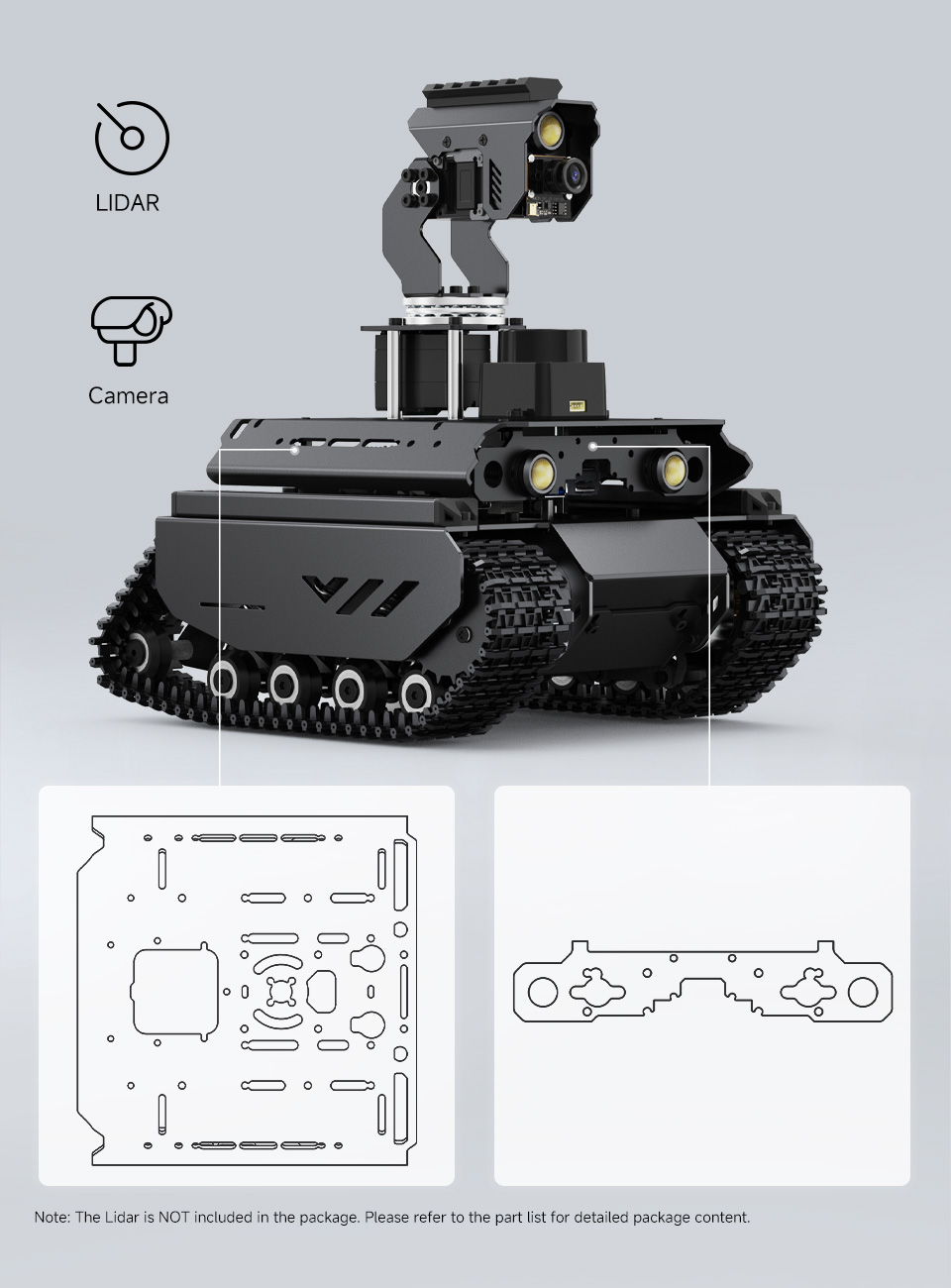
360° Flexible Omnidirectional Pan-Tilt
Equipped With 5MP 160° Wide-Angle Camera For Capturing Every Detail
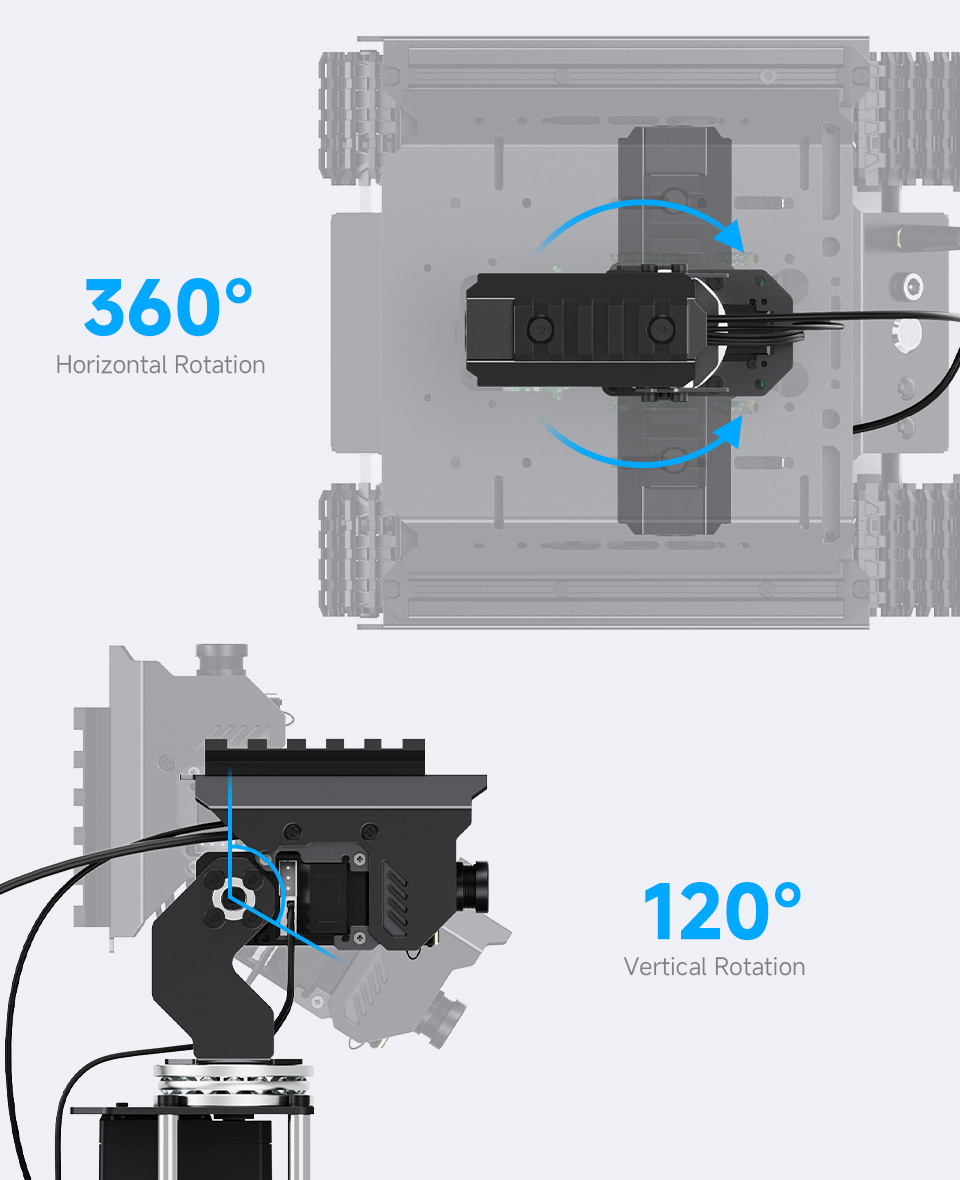

Supports Pan-Tilt drag-and-drop control via mouse or touch panel of the laptop, providing a better control experience as FPS games
Continuing The Adventure As Night Falls, Supports Tactical Extension
High-brightness LED light for Ensuring Clear Images In Low-Light Conditions
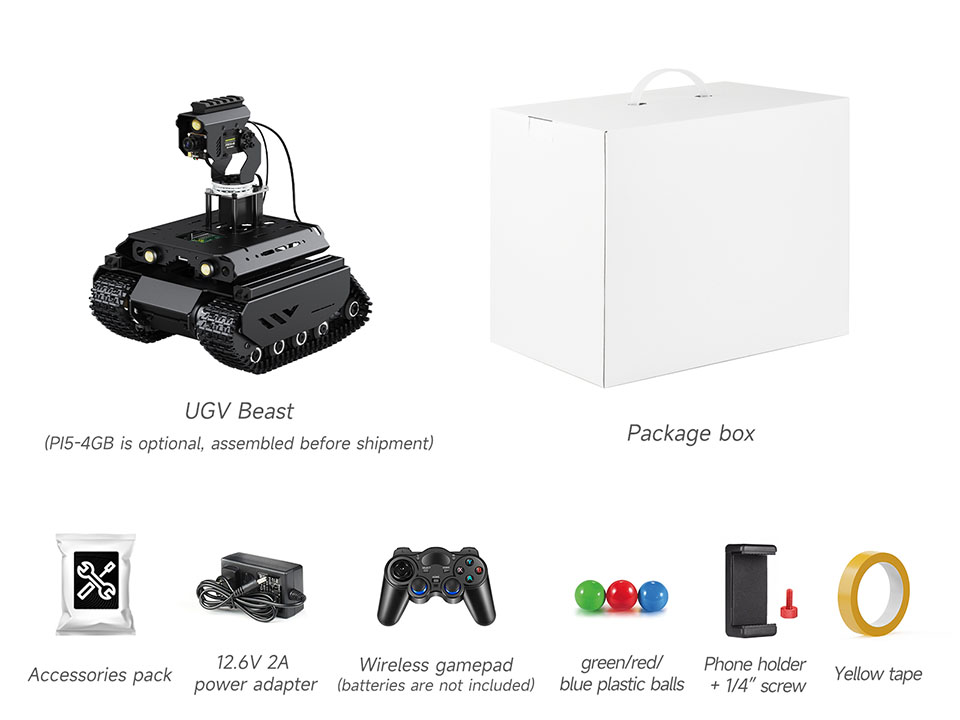
Comes with 21mm wide rail and 30KG.CM high precision & high-torque bus servo for tactical extension

for reference only, the accessories in the picture above are NOT included
Standard Aluminum Rail
Comes With 2 × 1020 European Standard Profile Rails, And Supports Installing Additional Peripherals Via The Boat Nuts To Meet Different Needs, Easily Expanding The Special Operation Scenarios

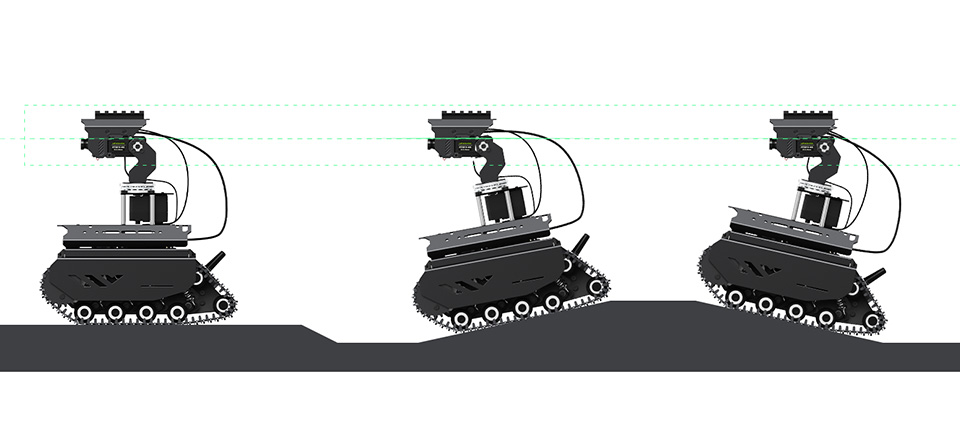
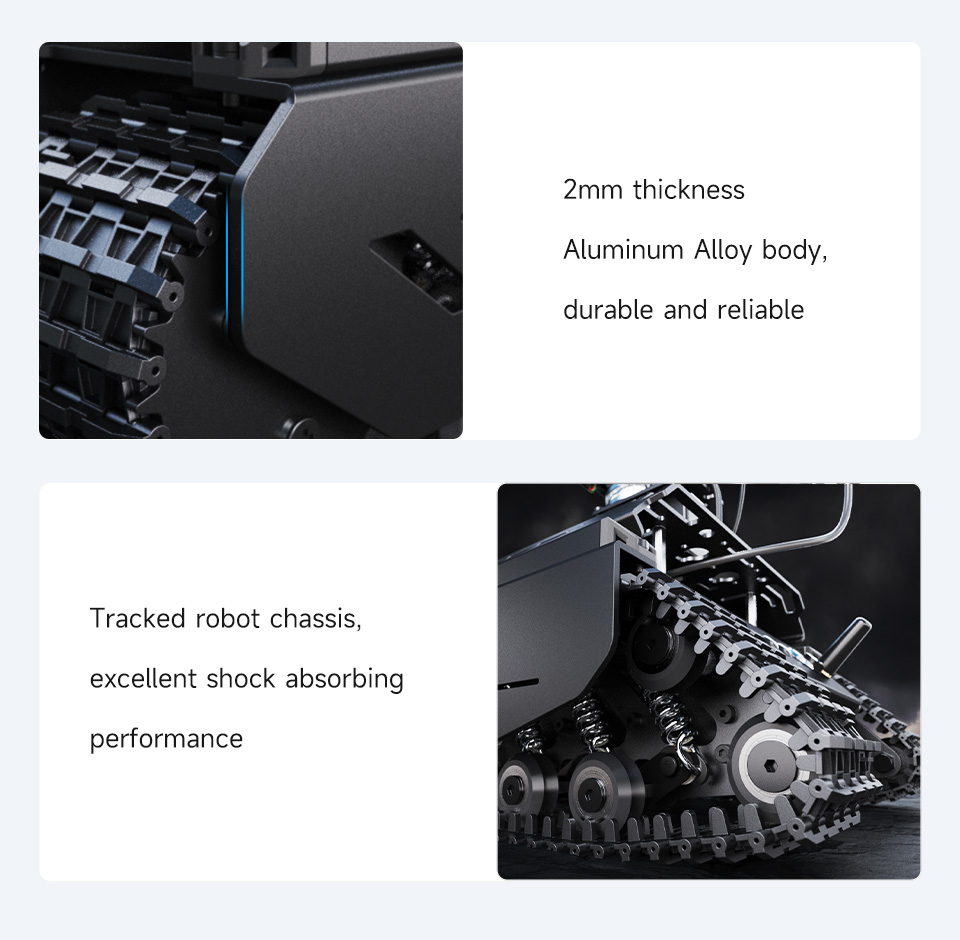
Supports Driving In Complex Terrain
Adopts Tracked Mobile Robot Chassis With Independent Suspension Systems For More Stable Off-Road Crossing Ability

Comes With A Multi-Functional
Mounting Plate
Can Be Used To Install A Variety Of Peripherals, Including D500 Lidar, STL-27L Lidar, Camera, Or Other Modules. Open Source For DXF Drawing And 3D Model, Which Is More Convenient For Secondary Development.
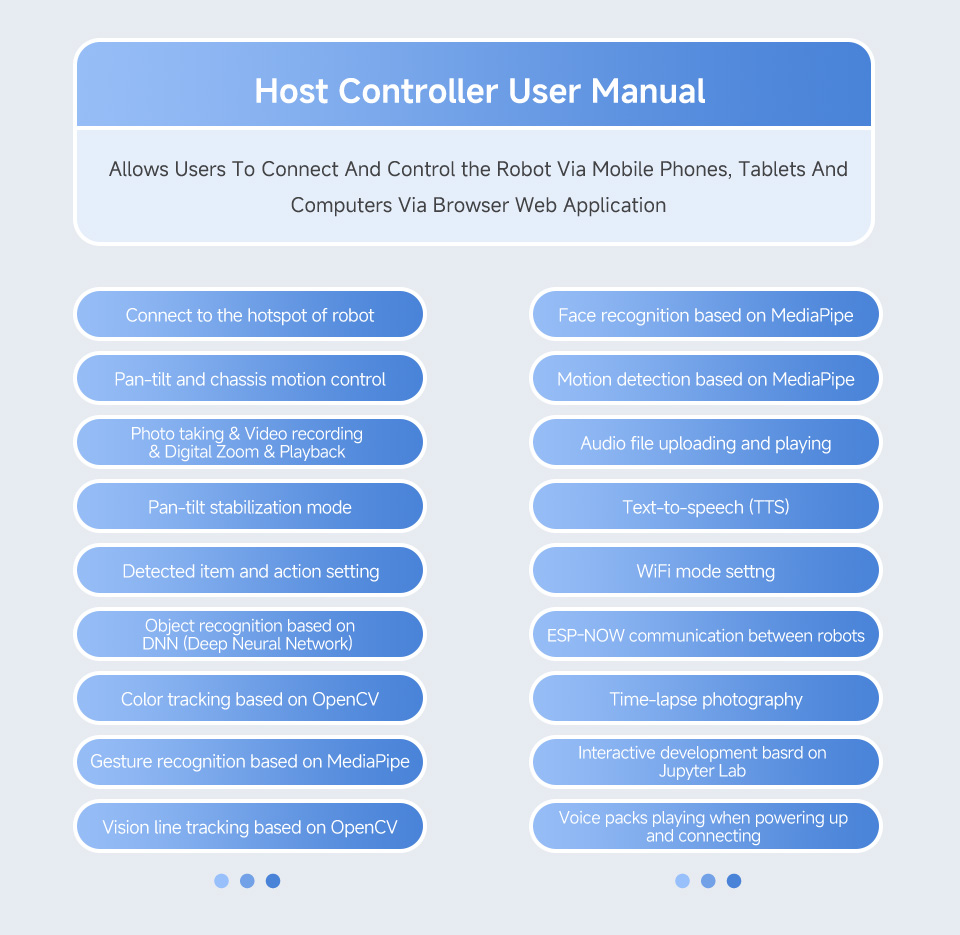
Easy To Control Via
Cross-Platform Web Application
No App Installation Required, Allows Users To Connect And Control The Robot By Mobile Phones, Tablets And Computers Via Browser Web App. Supports Shortcut Key Control Such As WASD And Mouse Control When Using A PC With Keyboard
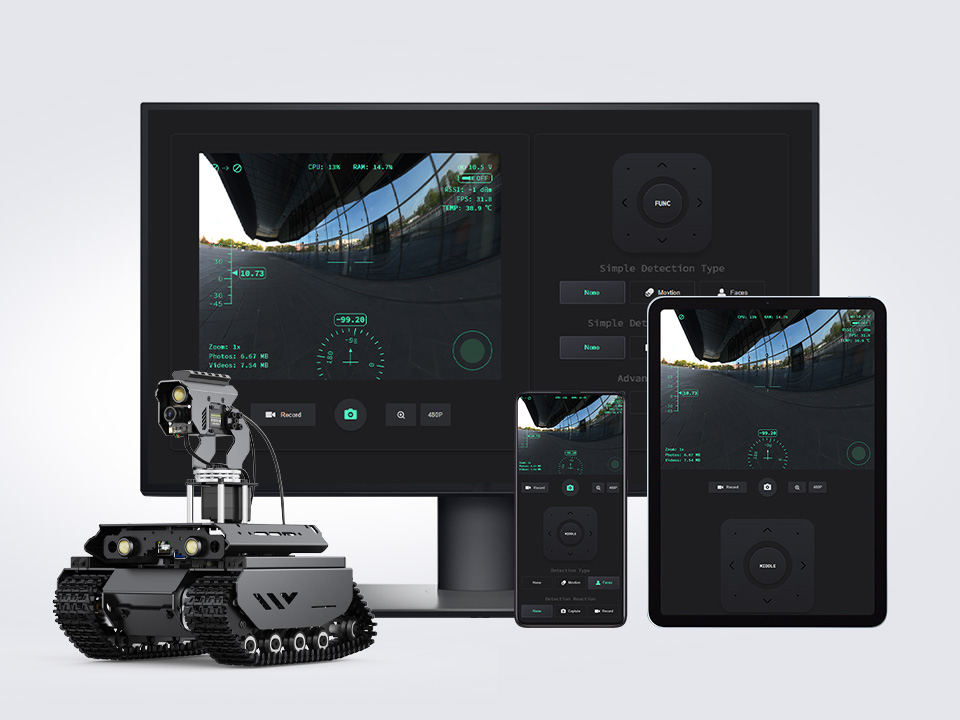
WebRTC Real-Time Wireless Transmission
Adopts Flask Lightweight Web Application, Based On WebRTC Ultra-Low Latency Real-Time Transmission, Using Python Language And Easy To Extend, Working Seamlessly With OpenCV

Recognition, Tracking, And Targeting
Based On OpenCV To Achieve Color Recognition And Automatic Targeting. Supports One-Key Pan-Tilt Control And Automatic LED Lighting, Allows Expansion For More Functions

Face Detection:
Automatic Picture Or Video Capturing
Based On OpenCV To Achieve Face Recognition, Supports Automatic Photo Taking Or Video Recording Once A Face Is Recognized

Intelligent Object Recognition
Supports Recognizing For Many Common Objects With The Default Model

Gesture Recognition:
AI Interaction With Body Language
Combines OpenCV And MediaPipe To Realize Gesture Control Of Pan-Tilt And LED
Gesture control for photo taking

LED ON/OFF and blacklight control
More MediaPipe Demos For Easily Creating
Complex Video Processing Tasks
MediaPipe is an open-source framework developed by Google for building cross-platform multimedia processing pipelines, provides a set of pre-built components and tools, its high-performance processing capability enables the robot to respond to and process complex multimedia inputs such as real-time video analytics.

Face Recognition

Attitude Detection
Vision Line Tracking For Autonomous Driving
Integrated With Vision Line Tracking Function On The Computer Vision Demo, Comes With Yellow Tape For Easier Path Planning. Users Can Understand The Basic Algorithms Of Autonomous Driving With This Simple Demo

Reserved Space For Expanding Peripherals
Reserved Space On The Mounting Plate With M2.5 Mounting Holes, For Installing D500 / STL27L LIDAR Or Other Peripherals
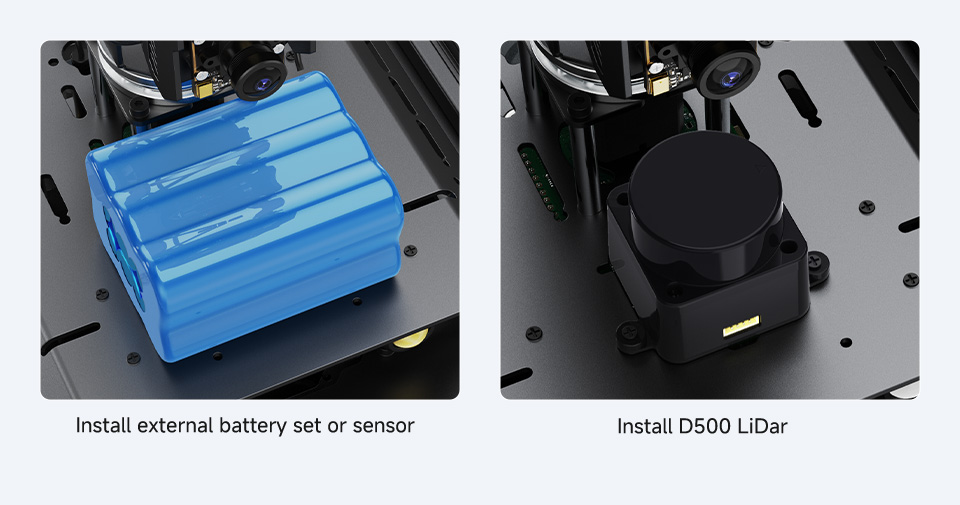
* Comes with screws and cables for installing the D500 LIDAR, please refer to WIKI for more details. The D500 LIDAR and battery set are NOT included.
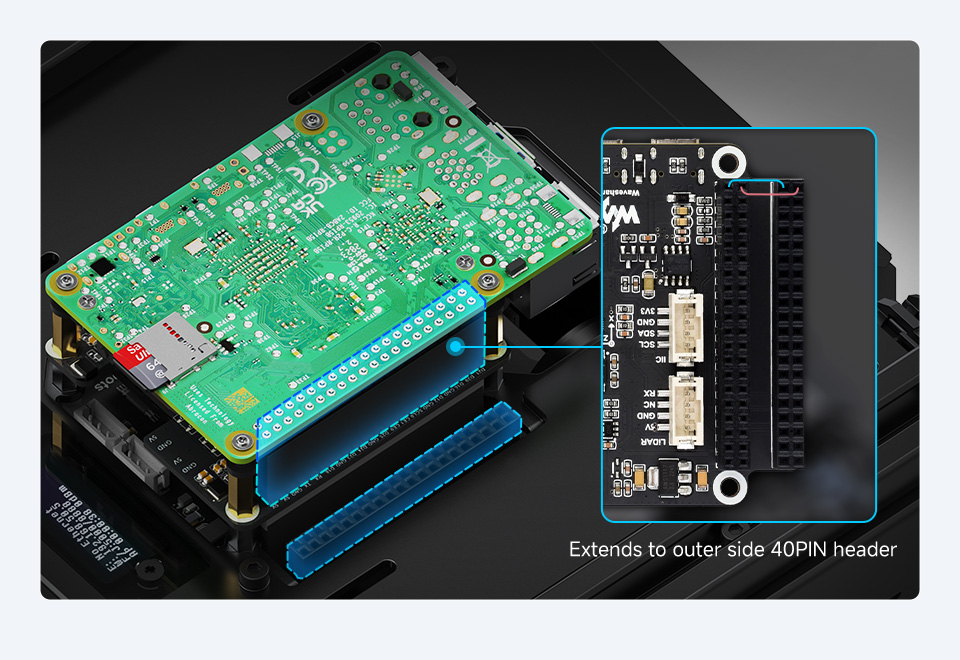
40PIN GPIO Extended Header
The Robot Only Occupies The URAT Interface Of The Raspberry Pi GPIO For Communication, Adapting Outer Side 40PIN Header On The Driver Board For Expanding More Peripherals And Functions
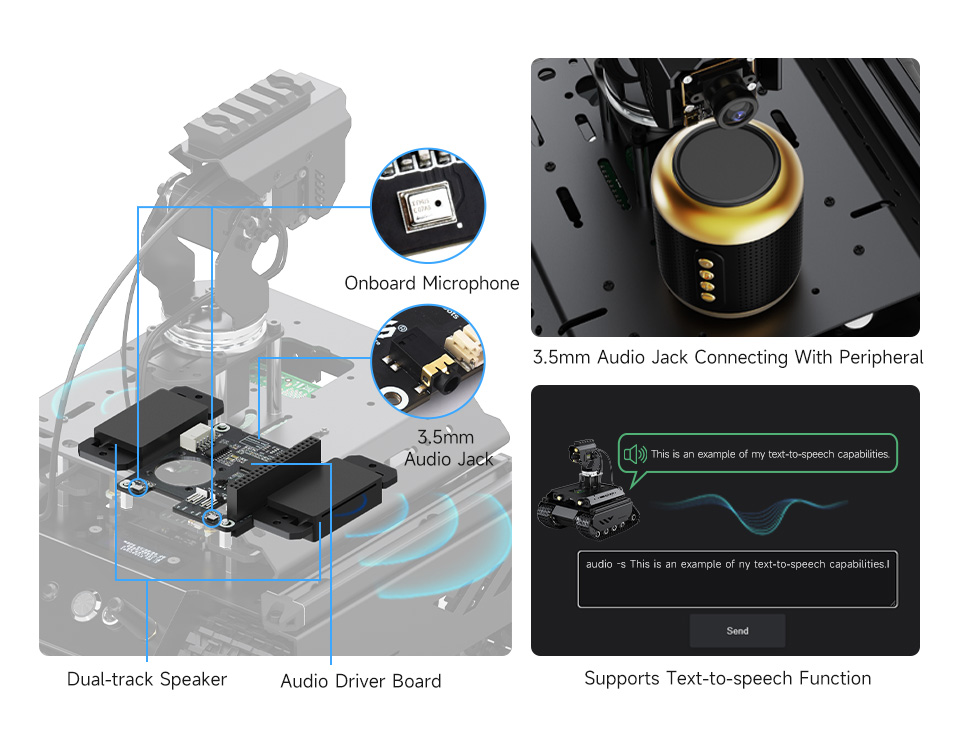
Multiple Audio Interaction Methods
Equipped With Audio Driver Board, Dual-Track Speaker, And Onboard Microphone, Built In 3.5mm Audio Jack For Connecting Peripherals To Achieve Text-To-Speech And Audio Playing
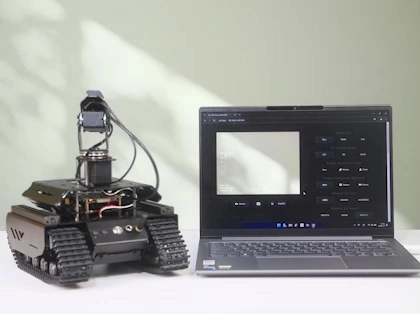
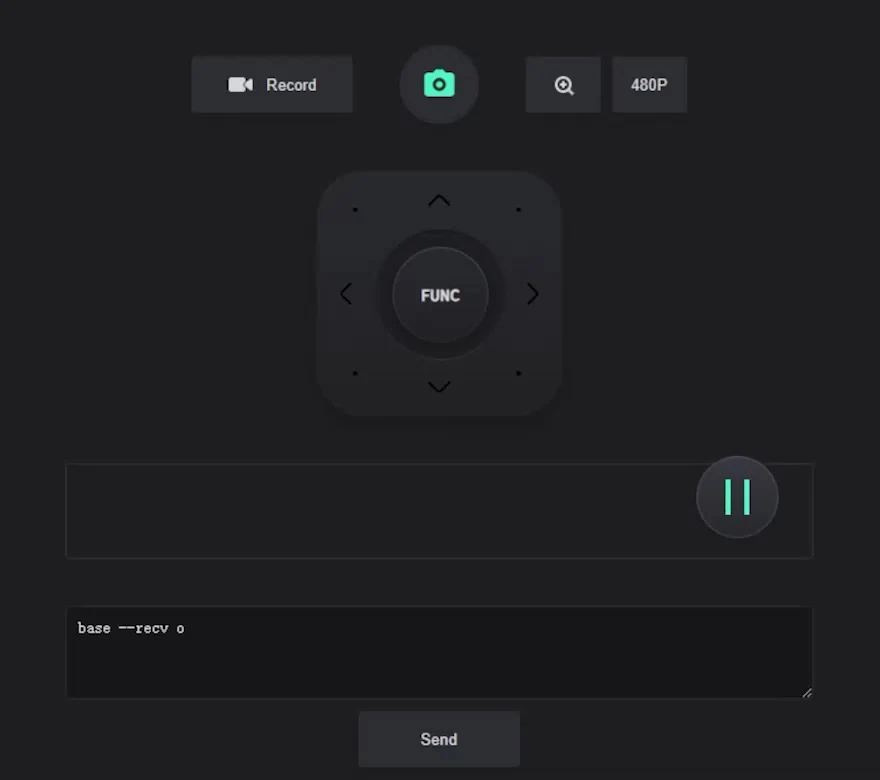
Obtains Real-Time Information Feedback
Real-Time Monitoring The Operating Status Of The Robot

Web Page Command Line Tool
Multiple Functions For Easier Expansion
Quick To Set Up, Easy To Expand
Easily Customize And Add New Functions Without Modifying Front-End Code
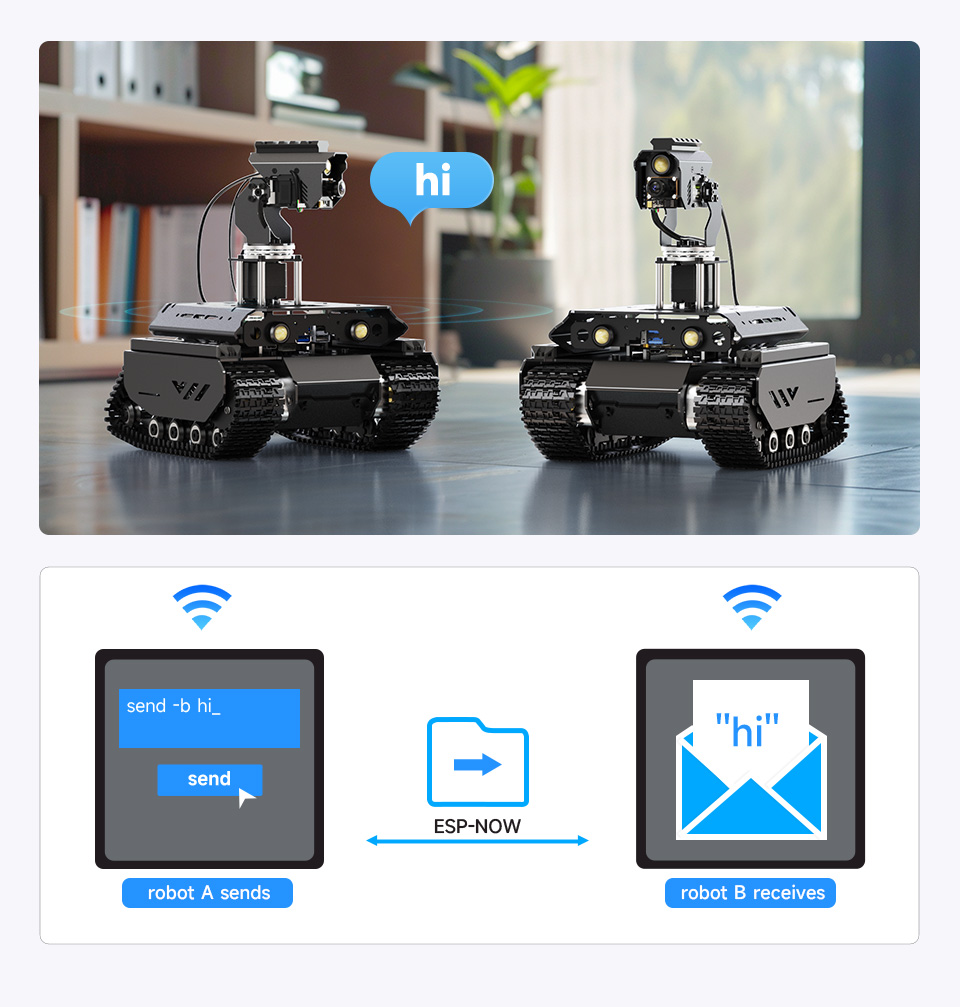
ESP-NOW Wireless Communication
Between Robots
Based On ESP-NOW Communication Protocol, Multiple Robots Can Establish Communication Without IP Or MAC Addresses, Achieving Multi-Device Collaboration With 100-Microsecond Low-Latency Communication
Supports Pan-Tilt Vertical Stabilization Function For Various Road Conditions
Supports Camera Stabilization Function Based On IMU Sensor To Keep The Image Stable. Realizes IMU Data Reading, Calculation And Pan-Tilt Control Via Sub Controller, Which Will Not Occupy Computing Resources Of The Host
Gamepad Control For Better Operation Experience
Comes With A Wireless Gamepad, Making Robot Control More Flexible. You Can Connect The USB Receiver To Your PC And Control The Robot Remotely Via The Internet. Provides Open Source Demo For Customizing Your Own Interaction Method

Supports 4G/5G Expansion
Supports Installing 4G/5G Module* For The Application Scenarios Without WiFi

* You may need to use Tunneling Service such as Ngrok, Cpolar, or LocalTunnel to expose the local network service of the robot (Flask application) to the Internet so that you can control the robot from anywhere.
Supports Remote Control Across The Internet
- Our web application demos are based on WebRTC for real-time video transmission.
- WebRTC (Web Real-Time Communications) is a technology that enables web applications and sites to establish peer-to-peer connection and capture optionally stream audio and/or video media, as well as to exchange arbitrary data between browsers without requiring an intermediary.
- We provide comprehensive Ngrok tutorials* to help you get started quickly and realize robot control across the internet.

* Provides the usage tutorials of Ngrok only, we do not provide any Ngrok accounts or Servers. You can follow our tutorial to open your own Ngrok service, or choose other tunneling services according to your needs.
Supports Installing Smartphone Holder
If You Have A Spare Phone, You Can Install It On The Robot Via Holder As Below, Using The Phone To Create A Hotspot For The Robot And Achieving Remote Control Across The Internet At A Lower Cost

* Comes with a smartphone holder with 1/4″ screw in the package
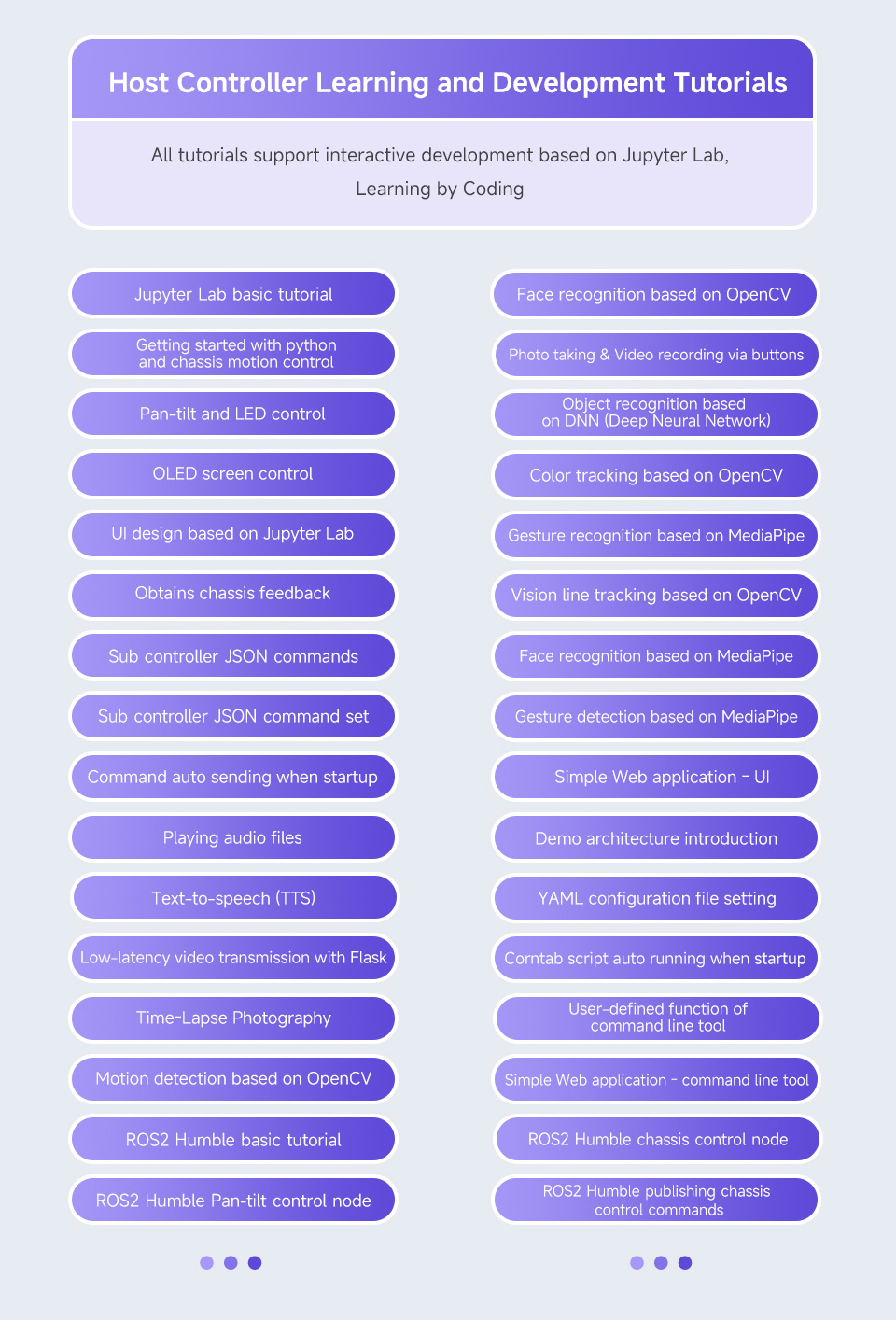
Cross-Platform Interactive Tutorial
Develop While You Learn
Supports Accessing Jupyter Lab Via Devices Such As Mobile Phones And Tablets To Read The Tutorials And Edit The Code On The Web Page, Making Development Easier


Rich Tutorial Resources
We Provide Complete Tutorials And Demos To Help Users Get Started Quickly For Learning And Secondary Development
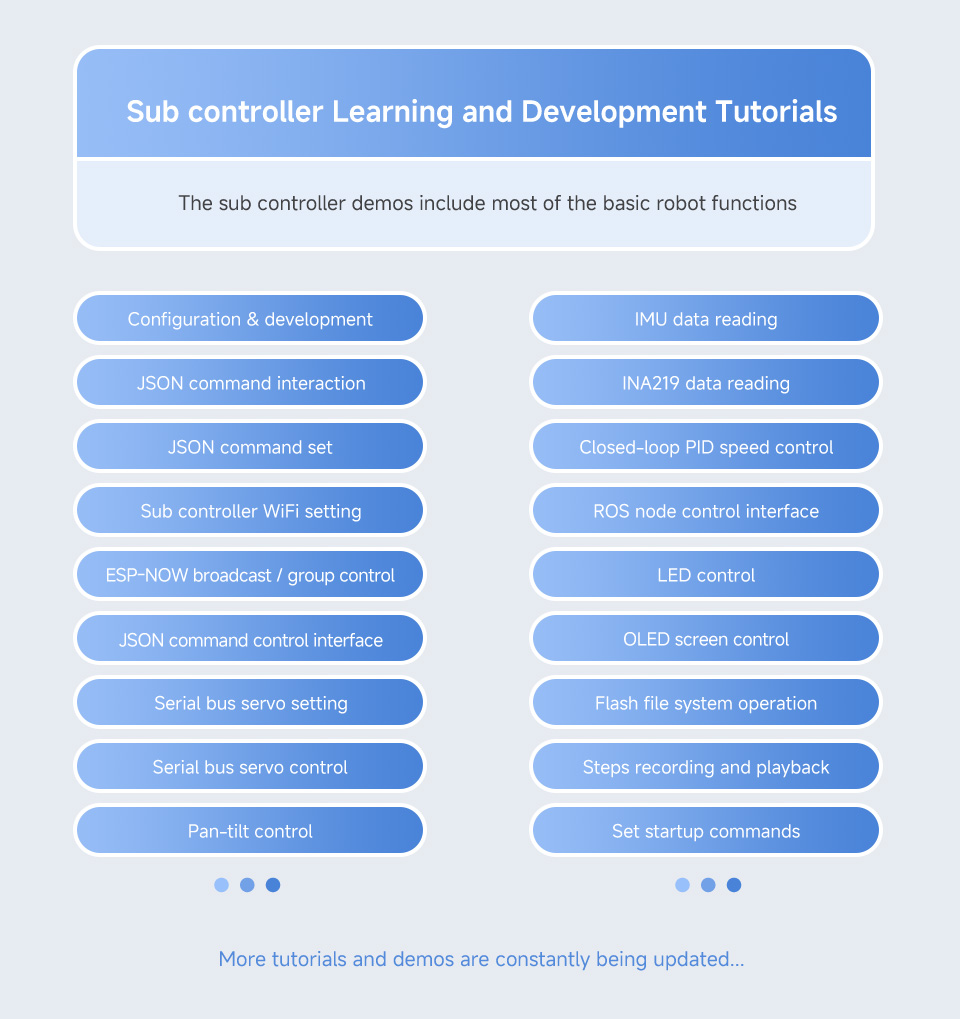
Open-Source All Demos
Full Dual-Controller Technology Stack
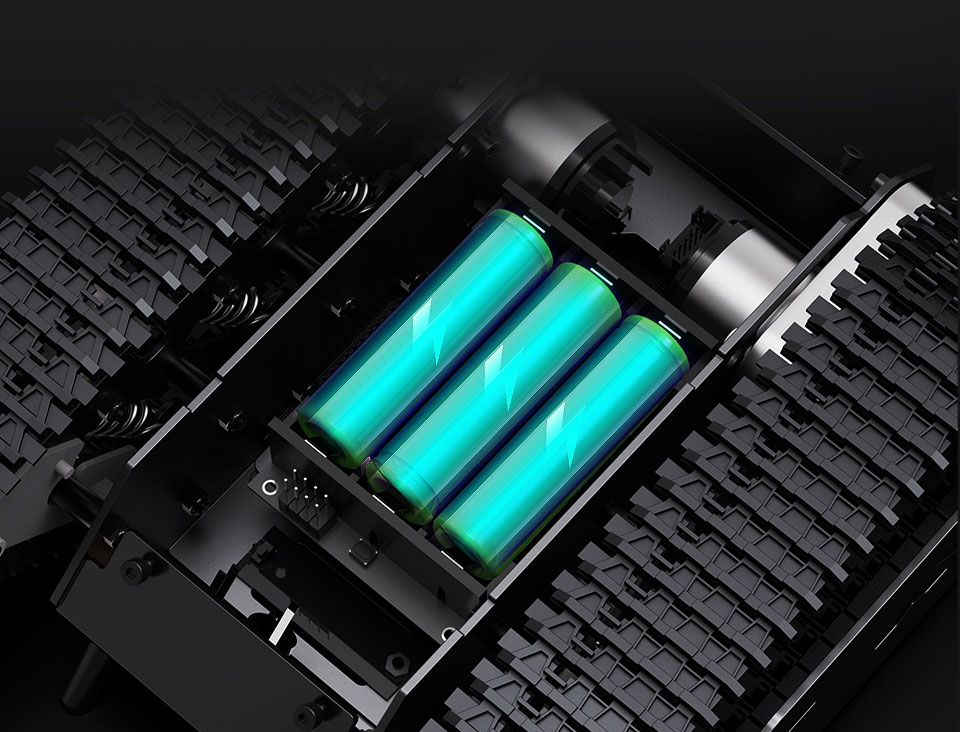
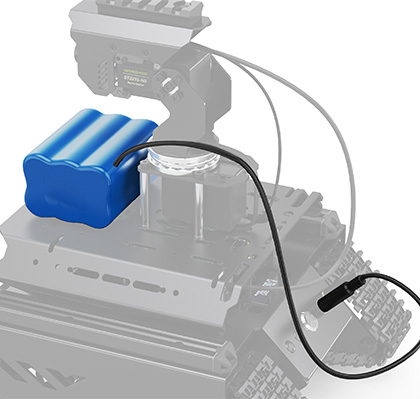
18650 Lithium Battery Support
Onboard High-Efficiency UPS Module, Supports Charging And Discharging At The Same Time To Ensure Continuous Standby Time
* the 18650 batteries are NOT included
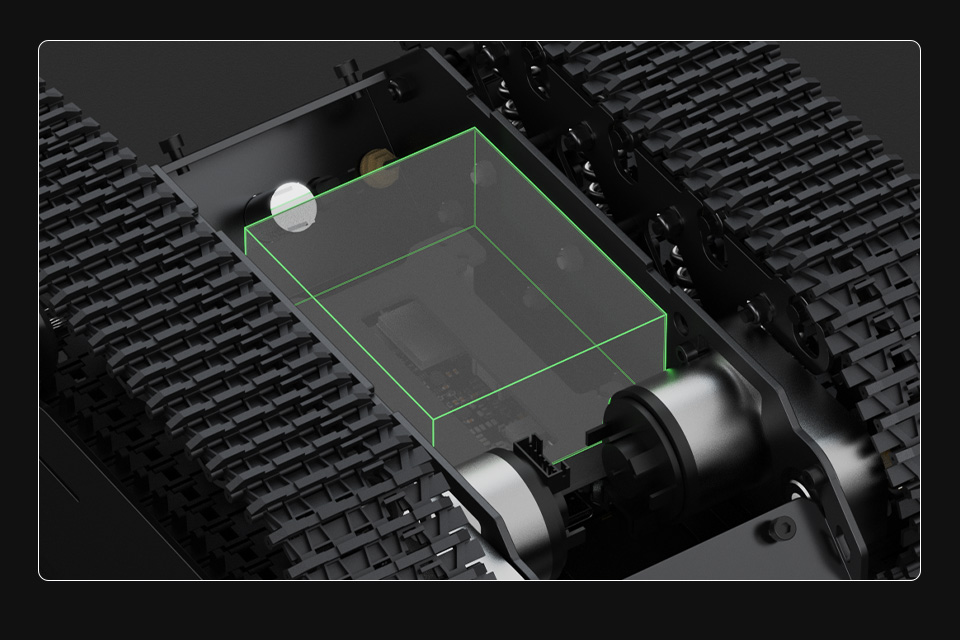
Large Internal Space For Extension
- Supports installing larger lithium battery set with XH2.54 interface to replace the UPS module
- Please refer to the open-source drawing for the detailed internal space dimensions
High Strength Aluminum Body
High-Speed Motor + High-Frequency PID Closed-Loop Speed Control
Supports Quick Response Without Occupying The Resources For The Host Controller
More Design Details

Automatically creates a hotspot for accessing when there is no available network connection after powering on

Built in high-efficient active cooling for long-time operation of the host controller even when compiling complex ROS2 packages

OLED display for real-time information displaying
Supports expanding external battery set via DC5521 port
Multi-Functional Driver Board
- Used as the sub controller of the robot, onboard ESP32 module and can be controlled via serial port, http request, ESP-NOW and other communication protocols, provides a web application for some basic control of the robot.
- ESP32 can handle low-level computations for the robot, such as high-frequency PID controller for controlling wheel speed, high-frequency inverse kinematics calculations for robotic arm linkages, position interpolation calculation, Pan-Tilt angle control and OLED screen control, etc.
- ESP32 is also responsible for data reading of various sensors, such as IMU (9-axis attitude sensor) and INA219 (battery voltage detection), and can independently achieve the camera vertical stabilization function, effectively saving computing and IO resources for the host controller.
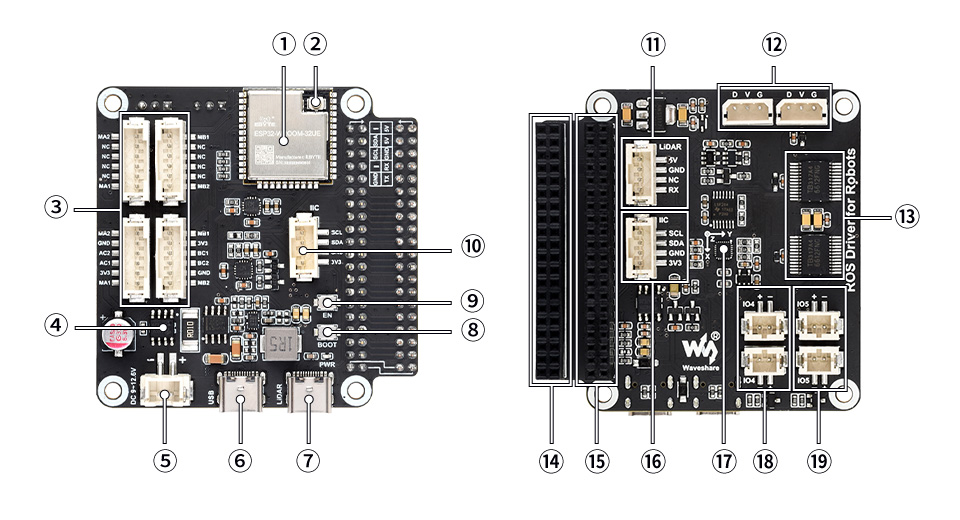
- ESP32 module
- ESP32 module antenna connector
- Motor control interfaces
- INA219
Battery voltage detection IC
- Power supply
- USB communication / downloading
- Lidar USB connector
- ESP32-IO0 button
- ESP32-EN button
- I2C device interface
- Lidar UART interface
- Bus servo control interfaces
- TB6612FNG
Motor driver IC
- Host controller 40PIN extended header
- Host controller connection header
- I2C device interface
- ICM20948
9-axis IMU attitude sensor
- 12V switch controlled by ESP32-IO4
- 12V switch controlled by ESP32-IO5
Audio Driver Board
- Audio driver board is designed for robot host controller, onboard USB interface, suitable for Raspberry Pi 4B / Raspberry Pi 5 and other motherboards, multi-system compatible.
- Adopts SSS1629A5 audio control chip, provides reliable audio input and output functions, supports USB interface communication, driver-free, plug and play. Onboard APA2068 audio amplifier chip, provides high-quality audio amplification to ensure clear and stable audio signal output.
- Integrated FE1.1S USB 2.0 HUB and CH340 chips for sending data from serial peripherals such as Lidar to the host controller via USB cable without occupying too many resources of the host.
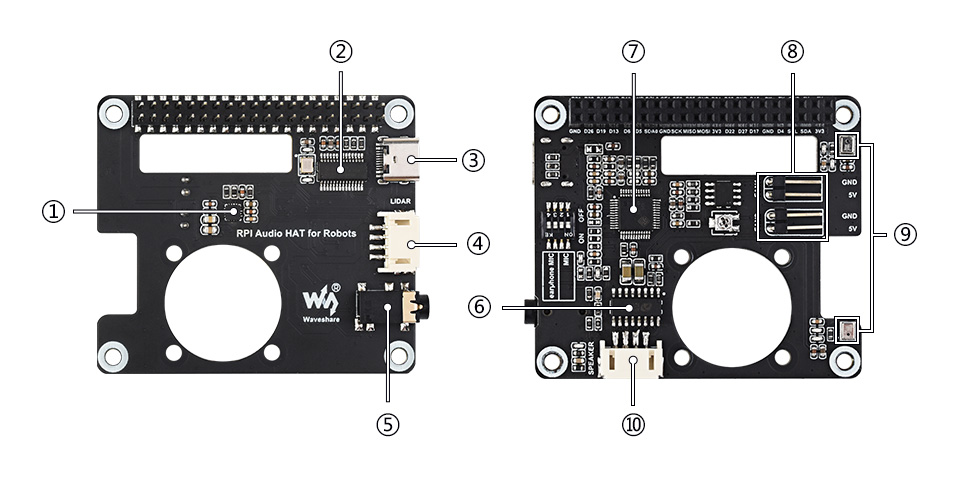
- Lidar UART to USB IC
- USB HUB IC
- Type-C port
- Lidar UART Interface
- 3.5mm AUX audio jack
- APA2068KAI-TRG
Audio amplifier IC
- SSS1629A5
Audio control IC
- Cooling fan power supply header
- Dual-track microphone
- Dual-track speaker header
Product Show

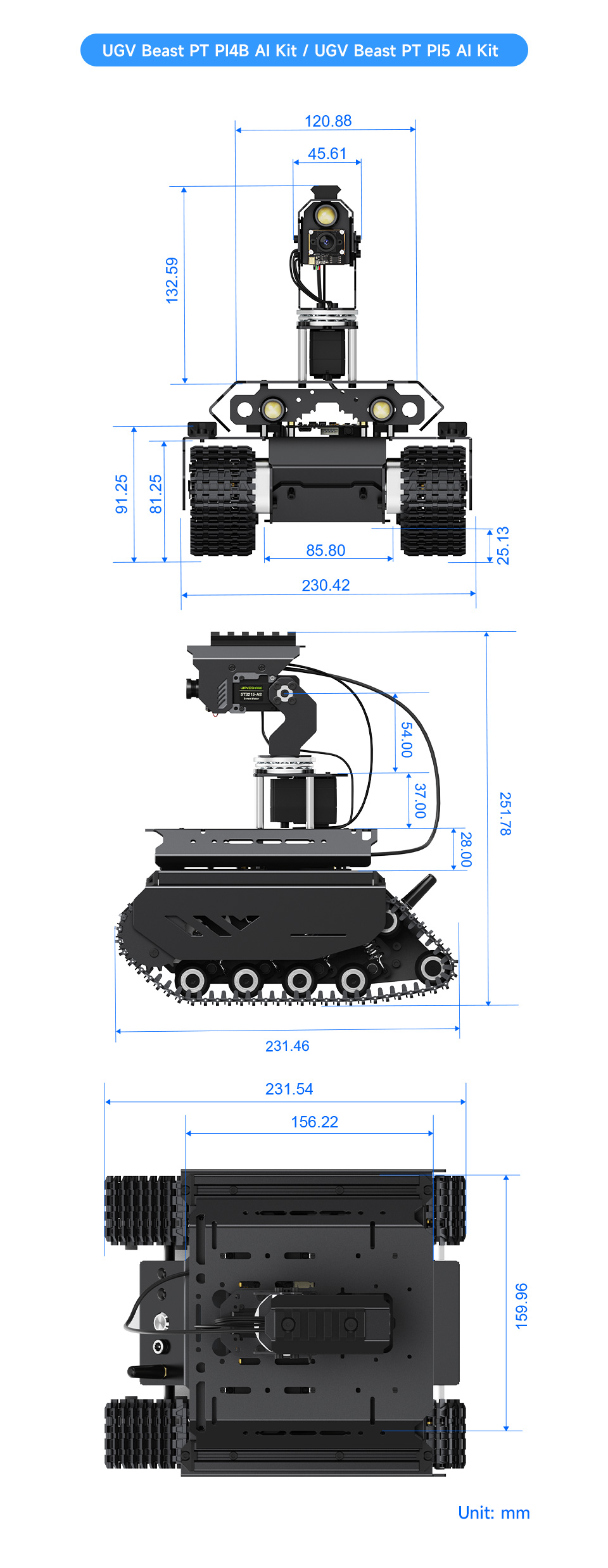
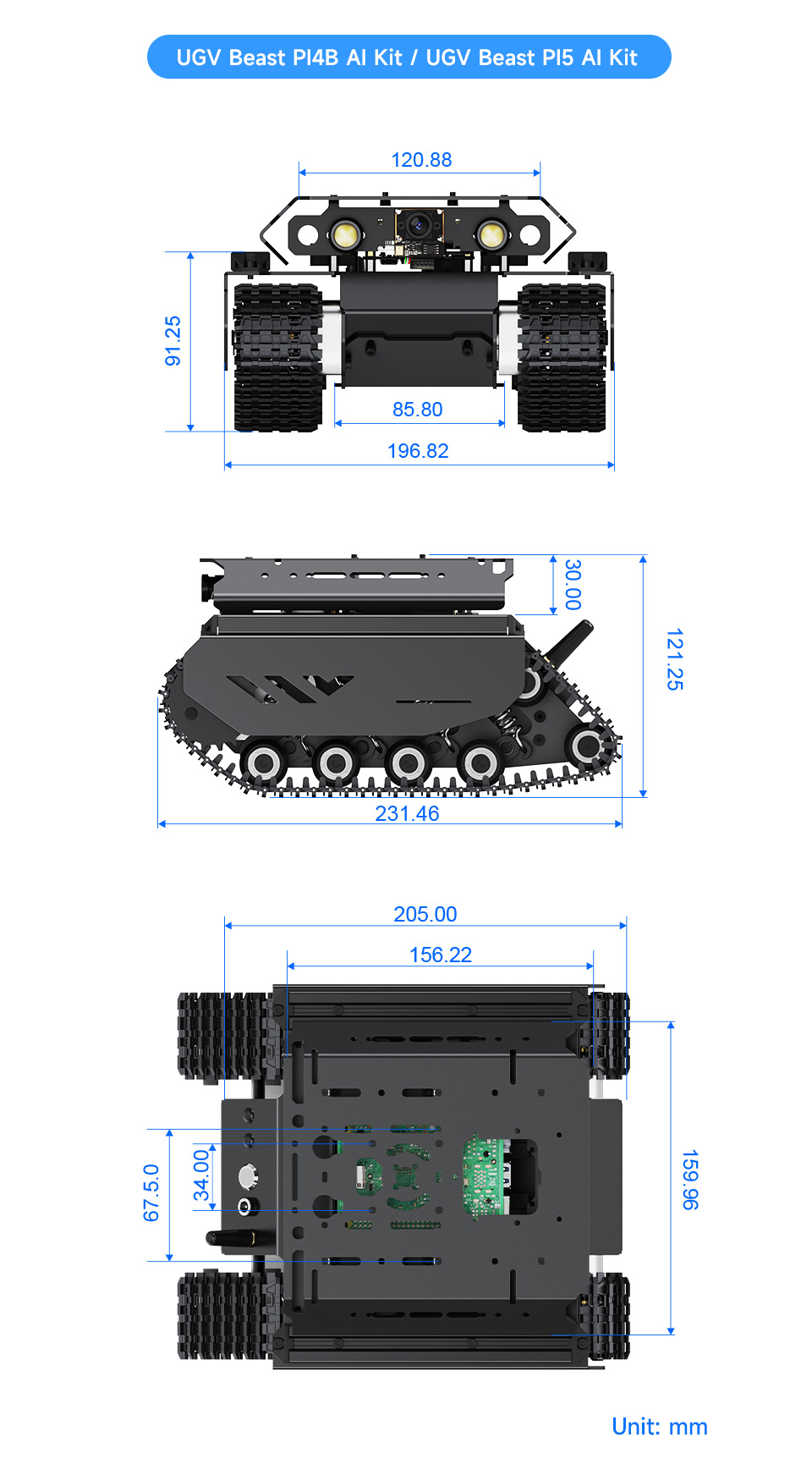
Outline Dimensions
Resources & Services